
Der erste Test

Der original-Antrieb der Vixen GP-DX
Update: 2022 habe ich das Upgrade auf die EQStarPro vorgenommen, die klaglos und zuverlässig läuft – alle Probleme durch selbstgelötete Kabel und den Überspannungsschaden der ersten Steuerung gehören nun der Vergangenheit an. Läuft wie ein Traum.
Den neuen Beitrag gibt es hier: Astro-Gadget EQStarPro Montierungssteuerung
———————
Die Vixen GP-DX war immer so etwas wie meine Traum-Montierung – was gewiss auch damit zusammenhängt, dass ich mit ihr angefangen habe: Auf der Heilbronner Sternwarte haben wir zwei C8, die lange auf Superpolaris-Montierungen betrieben wurden. Klasse Sache, stabil und deutlich leichter als die HEQ-5, die später kamen.
Als mir vor einigen Jahren eine gebrauchte GP-DX (noch aus Vehrenberg-Zeiten) im Biete-Forum von Astronomie.de über den Weg lief, schlug ich dann auch schnell zu. Auf dem Berlebach Uni Stativ hat sie eine gute Basis und ist – bei guter Einnordung – mit meinem ED80/600 sogar ohne Autoguider fototauglich.
Was mich aber immer genervt hat: Sie ist mittlerweile etwas pflegebedürftig, insbesondere die Antriebszahnräder haben sich gerne mal gelöst. Ein Inbusschlüsselsatz war mein ständiger Begleiter. Und da die originalen Vixen-Motoren langsam sind, hat man zwar eine Feinverstellung, aber gerade bei nur 600mm Brennweite ist der Effekte eher gering. An zeitgemäßes Goto ist da gar nicht erst zu denken.
Eine Lösung ist es ja, die Elektronik von einem China-Nachbau an das Vixen-Original zu bauen. Das “Skywatcher SynScan GoTo Upgrade für EQ-5 und Vixen GP Montierungen” liegt bei gut 400 Euro und lässt sich adaptieren, hat aber weiterhin Zahnradantrieb (und somit Getriebespiel). Früher gab es ein NexSXD-Projekt, um Celestron-Steuerungen zu adaptieren – wäre mir sympathisch gewesen, weil ich mich mit der Steuerung auskenne, gibt’s aber nicht mehr. Und dann kam auf Astrotreff dieser Thread. Damals lag die EQStar-Schrittmotor-Steuerung von Astro-Gadget für Schrittmotore auf Ebay noch bei rund 100 Euro, jetzt ist sie etwas teurer – aber dafür gibt es nun auch ein Goto Drive Set mit Motoren zum Spotpreis gibt, sodass man keine passenden Motoren mehr suchen muss. Nachteil: Sie kommt aus der Ukraine…
Aber gut 100 Euro war mir der Versuch wert, wobei ich deutlich mehr Geld in das Motorset für GP von Avalon investieren musste. Das ist zwar nicht wirklich ein Schnäppchen, aber für mich gab es ein paar Gründe, die dafür sprechen:
- Die Schrittmotoren sind mit der EQStar kompatibel, und von Avalon habe ich auf Anfrage auch die Pinbelegung erhalten. So kriege sogar ich als Elektroniklaie das hin
- Ich mag Avalon – ich konnte mal mit der M-Zero rumspielen, und falls die EQStar nichts taugt, gäbe es immer noch die Option, auf StarGo von Avalon aufzurüsten
- Keine Bastelei – die Motoren kommen im Gehäuse. Ich habe keine Werkstatt und keine Lust, groß rumzubasteln.
Heute würde ich wohl gleich das günstigere Komplett-Set von Astro-Gadget ausprobieren, aber zwei Kabel zusammenlöten ist auch kein so großes Problem.
Von Astro-Gadget kam via Ebay dann sehr flott die neue Steuerung: Ein Kästchen mit der Elektronik, ein WLAN-Modul, ein Kabel zum USB-Port vom PC (zur Steuerung via ASCOM), zwei Anschlusskabel für die Montierung und die Treiber-CD, dazu ein kleiner Joystick-Handcontroller, der statt eines Autoguiders an den Autoguider-Port der Steuerung passt.

Die Steuerung passt – mit einem Haargummi – perfekt an ein Berlebach Uni Stativbein. Unten das schwarze WLAN-Modul, links hängt der Joystick.
Nachdem ich zwei neunpolige D-SUB-Stecker aufgetrieben hatte, waren Kabel schnell zusammengelötet und die Motoren schnell angeschlossen. Erster Test am PC, noch ohne Montierung: Hm. Man braucht neben der ASCOM-Plattform ein Windows-Programm namens EQSettings, das auf der Mini-CD beiliegt. Nur: Der USB-Konverter wird zwar erkannt, aber das war’s dann auch. Eine Rücksprache beim Entwickler (danke für den guten Support!) brachte die Lösung: Dem USB-Konverter muss zwingend COM2 zugewiesen werden. Über die Systemsteuerung ging das einwandfrei, nun ich konnte die richtige Übersetzung einstellen (1:576 für die Avalon-Motoren) und über ASCOM irgendwie auch ansprechen (ASCOM ist für mich immer noch ein Buch mit sieben Siegeln) – aber irgendwo kam dann das Bedienfeld, und die Motoren liefen.
Zumindest eine Zeit lang. Bis irgendwann nichts mehr ging, nicht einmal der Piepser beim Anschalten.
Ich weiß bis heute nicht, ob es am Netzteil lag (das etwas mehr als 12V liefert, aber dafür auch bei Kälte genug Strom liefert), an der Steuerung (die 12V will, aber auch bis 15V vertragen soll) oder an der seltsamen Stromversorgung in diesem Haus, wo öfter mal die Sicherung rausfliegt.
Grmpf. Was tun? Die Steuerung in den Wind schreiben? Noch mal eine über Ebay kaufen? Kontakt mit dem Entwickler aufnehmen? Ich entscheide mich für letzteres und bin positiv überrascht: Für wenig Geld bietet er mir eine Reparatur an.
Die Reparatur an sich ist kein Problem, nur – wie kriegt man das Geld in die Ukraine, wenn Ebay nicht dazwischen steckt? Überweisungen aufs Handy sind vielleicht dort üblich, aber hier noch lange nicht, und eine Online-Überweisung? Guter Witz. Ich muss tatsächlich persönlich zur Bank gehen und eine Papierüberweisung abgeben. Online kann ich sie zwar auch gut versteckt ausfüllen, müsste sie dann aber auch ausdrucken und zur Bank tragen. Willkommen im Deutschland des 21. Jahrhunderts.

Die GP-DX mit Zahnriemen
Irgendwann kommt dann die Nachricht vom Zoll, dass ich die Teile abholen kann. Und die Frage, als was die Platinen einzuordnen sind. Was weiß denn ich, ich habe die Zollklassen noch nie gehört. Bin ich Elektroniker? Oder Zöllner? Ein paar Euro später habe ich die Steuerung dann in der Hand. Wenn ich die Spritkosten anschaue und die verlorene Arbeitszeit bezweifle ich, dass sich das für den deutschen Staat lohnt. Und mein Wagen fährt Diesel, bis in alle Ewigkeit…
In der Zwischenzeit habe ich mir auch noch einen LiFePO4 PowerTank von Celestron besorgt. Damit fällt die schwankende Stromversorgung vom Haus schon mal als Fehlerquelle flach, und die Tests können beginnen.
Nachdem dann alles zusammen war, ging es an die ersten ernsthaften Tests. Die Doku von EQStar ist diesbezüglich etwas mager, aber was soll’s – das gehört zu einem Bastelprojekt. Der Reihe nach:
Joystick-Steuerung und die Motoren

Die Motoren waren schnell installiert: Die alten Motorblöcke abschrauben, die alten Zahnräder und die Getriebekupplung von der Montierungsachse entfernen, dann die neuen Motoren samt Zahnrädern und Zahnriemen anschrauben – fertig. Die Avalon-Motorgehäuse werden jeweils nur mit einer Schraube an der Montierung befestigt und haben etwas Abstand zum Achsenkreuz der Montierung, also ziehe ich die Schrauben fest an. Über vier Schräubchen im Motorgehäuse lässt sich der Motor noch verschieben, um die richtige Spannung des Zahnriemens einzustellen: Das Band sollte sich ohne Kraftaufwand ein wenig verdrehen lassen (so ca. um 90°), dann passt es. Auch die großen Zahnräder sollten sich ohne Kraftaufwand drehen lassen.

Die Avalon-Motoren haben D-SUB-Buchsen. Für die ersten Tests hattee ich nur Steckergehäuse gefunden, für die ich einen Schraubenzieher brauche, um sie an die Motoren zu schrauben. Ohne Anschrauben sitzen sie nicht besonders fest und können leicht herausfallen (gerade bei schnellen Schwenks), aber ich habe nicht vor, die Montierung mit dem Schraubenzieher aufzubauen. Mittlerweile habe ich sie durch Stecker ersetzt, die sich mit der Hand verschrauben lassen.

Die manuelle Steuerung der Montierung erfolgt über einen kleinen Joystick, der in den Autoguiderport der Montierung gesteckt wird. Ein erster Test: Nachdem der Joystick einmal durch Drücken der Funktionstaste und Bewegen des Joysticks aktiviert wurde, bewegt sich die Montierung. Funktionstaste und Joystick in Deklination bewegen stellt die Geschwindigkeit ein (von 20x bis 500x); Drücken in Rektaszension stellt die Nachführgeschwindigkeit ein. Piepser zeigen an, welchen Wert man gerade eingestellt hat. Man darf in der Nacht nur nicht in die falsche Richtung drücken, sonst läuft auf einmal die Nachführung mit der falschen Geschwindigkeit… Aber soweit läuft es einwandfrei. So schnell war meine Montierung noch nie:-)

Letztlich ist sie sogar zu schnell: Nach einiger Zeit scheppert die Montierung. Des Rätsels Lösung: Eine Schraube ist zu wenig, um die Motoren fest an ihrer Position zu halten, sie haben sich verdreht. Mit einem Abstandshalter aus Plastik kann ich sie unterfüttern, jetzt läuft sie ruhig, und die Motoren bleiben an ihrem Platz.
Beim Test am Nachthimmel gab’s dann wieder eine Ernüchterung: Die Rektaszensionsachse läuft einwandfrei, die Deklination nicht – nicht einmal per Hand kann ich sie drehen. Wir haben mittlerweile nicht die rund 20° vom Wohnzimmer, sondern um die 0° in der freien Natur, und das Schneckenspiel der Dek-Achse ist jetzt zu stramm. Ich hatte ganz vergessen, dass man das bei der GP-DX ab und zu mal justieren muss. Also ab nach Hause, wo die Inbusschlüsselsammlung ist, Motor abbauen und lockerer einstellen. Dann ab ins Bett…
Beim nächsten Test hat es wie gewünscht funktioniert. Etwas gewöhnungsbedürftig: Der Joystick spricht immer nur einen Motor an. Man kann also nicht beide Achsen gleichzeitig bewegen.
Die Steuerung per App
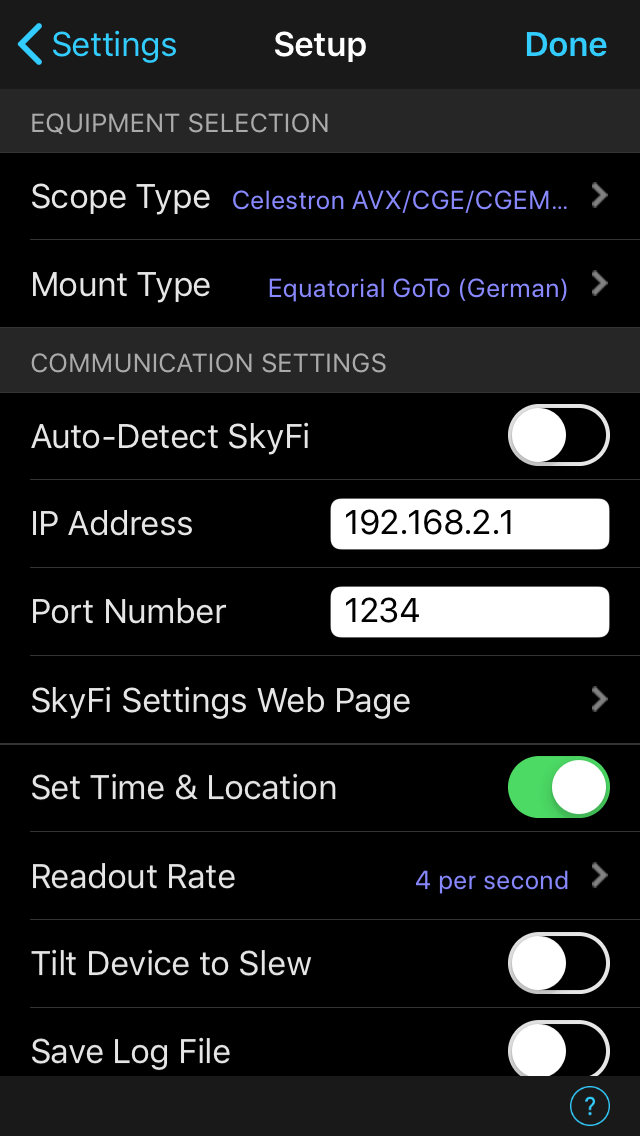
Noch mehr Trockentests: Der Steuerung liegt ein WLAN-Modul bei, um das Ganze per App zu steuern – zum Beispiel mit SkySafari Plus. Ich habe etwas gebraucht, um brauchbare Einstellungen zu finden. Im Augenblick habe ich sie als Celestron AVX konfiguriert, SkyWatcher SynScan wäre wohl auch einen Versuch wert.
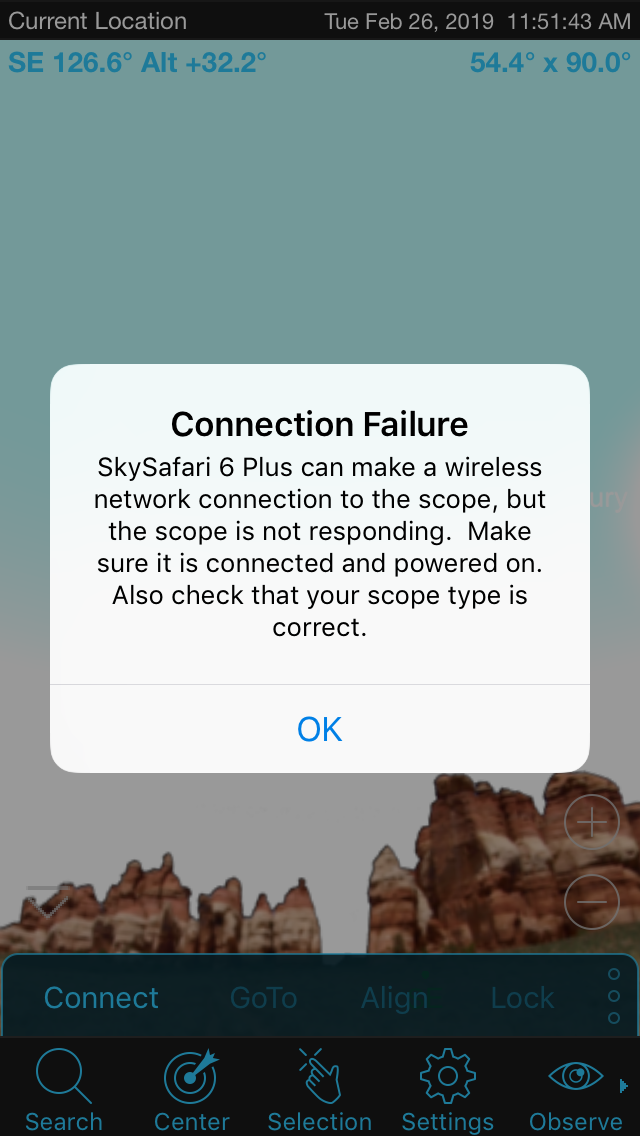
Die WLAN-Verbindung ist etwas haklig, was aber durchaus an Apple liegen kann – ich habe die Software auf einem älteren iPhone laufen. Auf jeden Fall muss ich immer etwas warten, bis WLAN-Symbol in der Statusleiste erscheint. Vorher muss ich gar nicht erst versuchen, SkySafari zu öffnen (obwohl es manchmal auch funktioniert, wenn LTE statt WLAN angezeigt wird – da steige ich noch nicht ganz durch). Dann kann ich mich meistens über den Connect in SkySafari mit der EQStar-Steuerung verbinden, kriege aber öfter die Fehlermeldung, dass die Steuerung nicht anspricht. Ein Handy-Neustart hilft häufig. Ein Android-Gerät mag besser funktionieren, keine Ahnung.
Wenn die Verbindung steht, läuft es aber ganz gut: Die Steuerung geht davon aus, dass das Teleskop auf den Himmelspol zeigt. Dann muss ich einen neuen Referenzstern anfahren, das Teleskop schwenkt dahin, und ich zentriere ihn über den Joystick oder besser noch mit gelösten Achsklemmen, bestätige in der App mit Align, und fertig. Das ist dann zwar nur ein Ein-Stern-Alignment (mehr kann SkySafari wohl nicht), funktioniert aber schon ganz gut.
Bis das Handy in den Ruhezustand geht und die Verbindung kappt. Unter Appearance & Behaviour bietet SkySafari zwar auch ein “Prevent Sleep”, aber manchmal sind die Reflexe schneller, und ich schalte das Handy aus. Was dafür nett ist: Ich kann die Motoren auch bewegen, indem ich das Handy etwas hin- und herneige. Wobei ich zugeben muss, dass der Touchscreen besser funktioniert als gedacht, auch wenn man die Richtungstasten nicht ertasten kann.
Ach ja: Der kleine Celestron LiFePO4 PowerTank versorgt entweder USB oder Teleskop mit Strom. Ich kann das Handy also nicht ebenfalls über den Powertank mit Strom versorgen – das größere Modell des PowerTanks soll es können. Mist.
Das Goto funktioniert schön, es ist nur etwas ungewohnt, dass erst eine Achse gefahren wird und dann die andere. Außerdem muss ich aufpassen, dass der Motor nicht an der Montierung anschlägt – aber das bin ich von der FS2-Steuerung der Alt-Montierung der Heilbronner Sternwarte auch gewohnt. Ein Tastendruck bricht den Schwenk ab.
Unter Android gibt es noch eine kleine App, um der Steuerung Datum, Zeit und Standort mitzuteilen. Dann weiß die Montierung auch, wann sie umschwenken soll. So erklärt das vielleicht die teilweise etwas seltsamen Positionswinkel. Die Objekte werden aber gefunden.
Fazit: Das Verbinden mit dem WLAN ist etwas hakelig, aber wenn es klappt, läuft es gut.
Steuerung per PC
Das habe ich bislang nur im Trockentest gemacht, aber wenn ich das richtig verstehe, muss ich ASCOM nur auf EQMOD konfigurieren, und muss mich nicht um um Getriebeübersetzungen und so kümmern. Zumindest bewegt sie sich, wenn ich in Guide einen Stern anfahren will. Wenn ich das richtig verstehe, gibt ASCOM nur die Wunschkoordinaten weiter, und die Steuerung kümmert sich um den Rest.
Fazit

Für’s erste bin ich begeistert, vor allem vom Preis-Leistungs-Verhältnis. Die hundert Euro (mittlerweile liegt sie bei 150 Euro, wobei ich das auch schon für die reine Steuerung inkl. Autoguidereingang zu zahlen bereit gewesen wäre) plus Motoren ist sie auf jeden Fall wert. Mir waren schnellere Motoren und Autoguidereingang am wichtigsten. Das Goto ist nicht ganz so wichtig, aber gerade beim Fotografieren sehr hilfreich.
Die EQStar scheint eine gute Möglichkeit zu sein, um eine solide ältere Montierung wie die SP/GP auf den modernen Stand zu bringen, wenn man sich ein bisschen reinarbeiten will. Wenn ich die Arbeitszeit rechne, wäre eine neue Montierung (ohne Zahnriemen und wohl mit geringerer Präzision) günstiger (je nach Stundensatz) – aber ein bisschen rumbasteln gehört zum Hobby Astronomie, und ich sehe keinen Grund, mich von einer alten, aber perfekt laufenden Montierung zu trennen.
Probleme hat vor allem die mangelnde Dokumentation gemacht, aber ich hoffe, alle Problemchen, die ich hatte, lassen sich mit diesem Blogbeitrag lösen. Ich würde die Steuerung nach aktuellem Stand jedenfalls wieder kaufen.
Sehr praktisch ist, dass ich das Kästchen mit der Steuerung – nachdem ich es mit der Bohrmaschine malträtiert habe – einfach mit einem Haargummi am Stativ befestigen kann. Das Kabel zum stationären Rektaszensionsmotor habe auf die kürzeste sinnvolle Länge gekürzt. Das zum Dek-Motor hat eine ziemlich gute Länge, auch wenn es bei kalten Temperaturen etwas steif wird. Und ich habe sogar einen Ersatz für die verbogene Polhöhenschraube meiner Montierung gefunden, sodass sie jetzt wieder voll einsatzfähig ist.
Der Zahnriemenantrieb ist sehr nett, beseitigt aber nur das Getriebespiel, nicht das Schneckenspiel. Schade, dass die GP-DX keine angefederte Schneckenachse hat…
Der nächste Schritt ist dann, wieder ein bisschen durch das Teleskop zu Fotografieren, wenn alles läuft. Bislang habe ich für fokale Fotografie ja vor allem das Equipment der Heilbronner Sternwarte genutzt und war mit kleinen Brennweiten auf dem Star Adventurer unterwegs, oder ohne Guiding mir der GP-DX. Wann ich das alles testen kann? Keine Ahnung – nächste Woche geht’s wieder auf die Hurtigrute, und wenn ich zurück komme, sind die Nächte schon wieder deutlich kürzer. Astronomie braucht Geduld:-)

Bis dahin wird mal alles im neuen Köfferchen verstaut (Schaumstoff von Koffermarkt.com, Koffer von Thomann. Und da gefragt wurde: Der Montierungskoffer mit dem meisten Fotokram und dem Gegengewicht liegt bei 21,5 kg, die Stativtasche bei 13,1 kg (inklusive der Vixen Porta-Montierung, wenn ich rein visuell unterwegs bin. Der Teleskopkoffer mit der aufgesattelten Ablageplatte von Stativ bei 17,8 kg. Das kann ich jetzt alles schön einlagern, bis ich wieder in Deutschland bin und klaren Himmel habe.
Moin,
kennst Du die Zahnriemenübersetzung bzw. die Anzahl der Zähne pro Rad?
Peter
Das Übersetzungsverhältnis vom Avalon-Motorset (https://www.baader-planetarium.com/de/montierungen/avalon/zwei-achsen-motorkit.html) ist 1:576. Der Wert ist bei der Steuerung auch voreingestellt. Viele Infos zur GP-DX gibt’s auch unter https://cg-5.de/archiv/html/gp-dx.html